AC Motor:
AC Motors are generally of two types.
- Induction Motors
- Synchronous Motors
Ac Motors may be a single-phase or three-phase. Due to robustness in construction, longer life, ease of operation and lower-cost induction motors are widely used in the industries.
Induction Motors:
Induction Motors are the electrical machine which converts electrical energy to mechanical energy in form of torque. The principle in which the three-phase induction motor works is that when short-circuited windings are placed within a rotating magnetic field due to electromagnetic induction a current is produced in the windings and then tends to move the rotor of the induction motor.
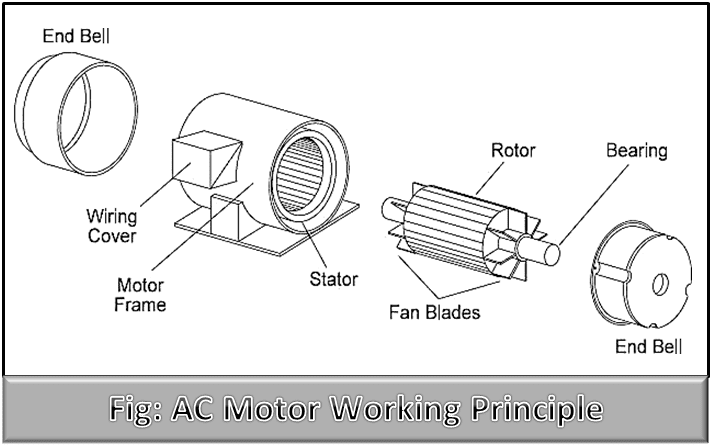
A three-phase induction motor has two parts:
i. Stator: It carries three-phase stator winding. The stator winding is directly connected to the three-phase supply.
ii. Rotor: The rotating part of the machine carries a short-circuited winding. The rotor winding doesn’t directly connect to the electrical power. The winding of the induction motor gets voltage and current from the externally electrically energized stator winding of the induction motor through the principle of electromagnetic induction.
Principle of Operation of Three Phase Induction Motor:
When a short-circuited coil is placed in a rotating magnetic field, a current is set up in the coil and tends to move due to electromagnetic induction. When a three-phase supply is fed to the stator winding of the three induction motors it produces a rotating magnetic field revolving at synchronous speed.
As the rotating magnetic field cuts the short-circuited copper bars of the squirrel cage induction motor rotor winding, then a high current flows into the rotor bars and creates another field.
Now, this rotor field opposes the main rotating field. As the rotor is designed to be free-moving, it tends to follow the rotating field in the same direction of rotations. Now, the rotor starts and picks up the speed until it approaches the synchronous speed. The rotor never reaches the synchronous speed and the runs are always just below the synchronous speed.